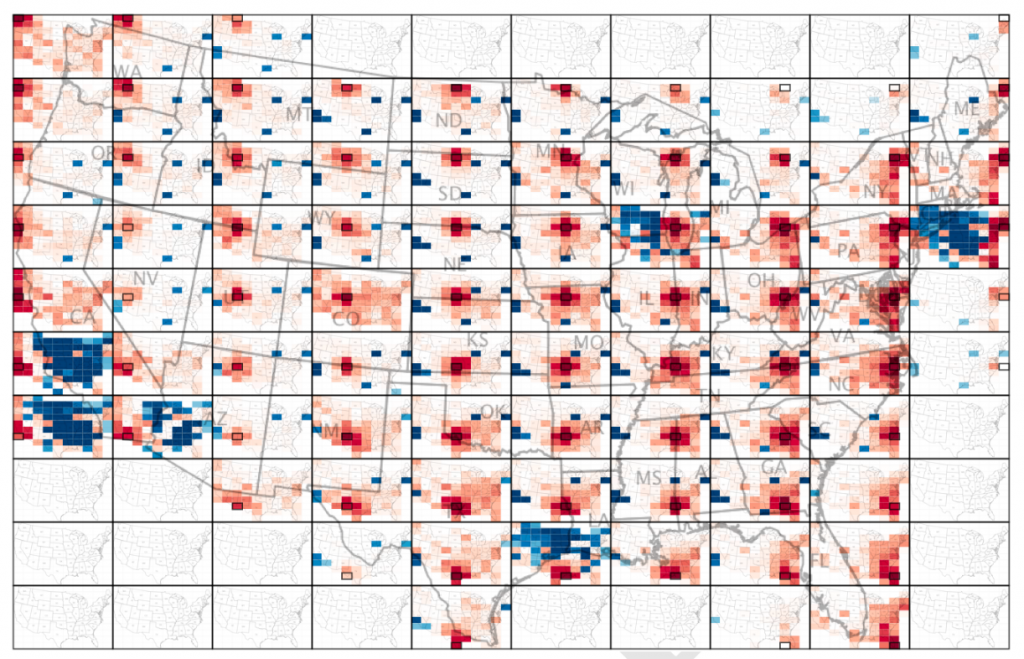
We propose mapping OD vectors as cells rather than lines, comparable with the process of constructing OD matrices, but unlike the OD matrix we preserve the spatial layout of all origin and destination locations by constructing a gridded two-level spatial treemap. The result is a set of spatially ordered small multiples upon which any arbitrary geographic data may be projected.
Source: Visualization of Origins, Destinations and Flows with OD Maps